



1636 Motor DC sine spazzolis ad apparatum mensurae
Introductio Producti
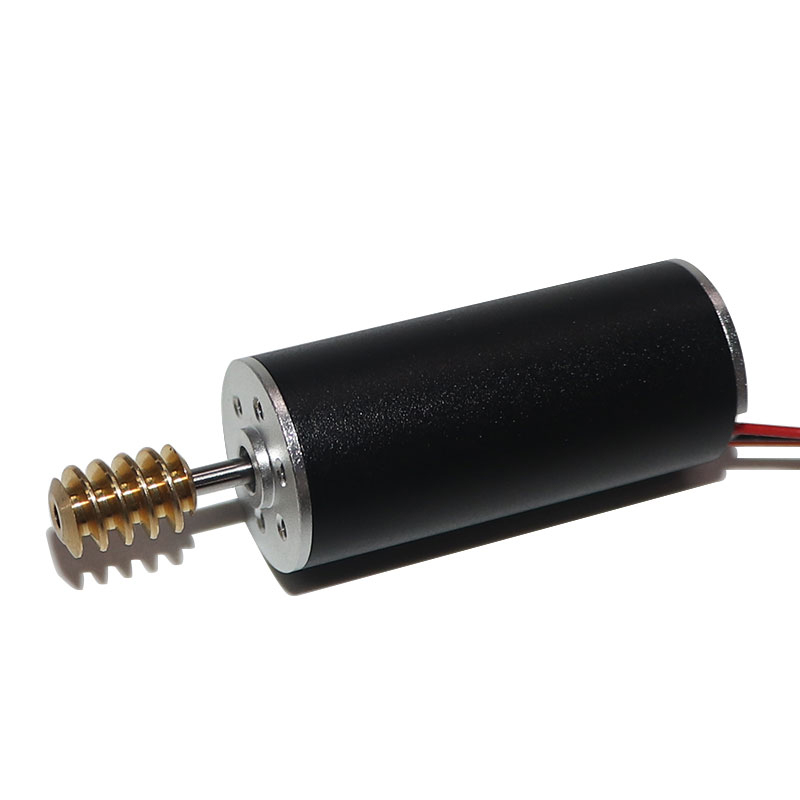
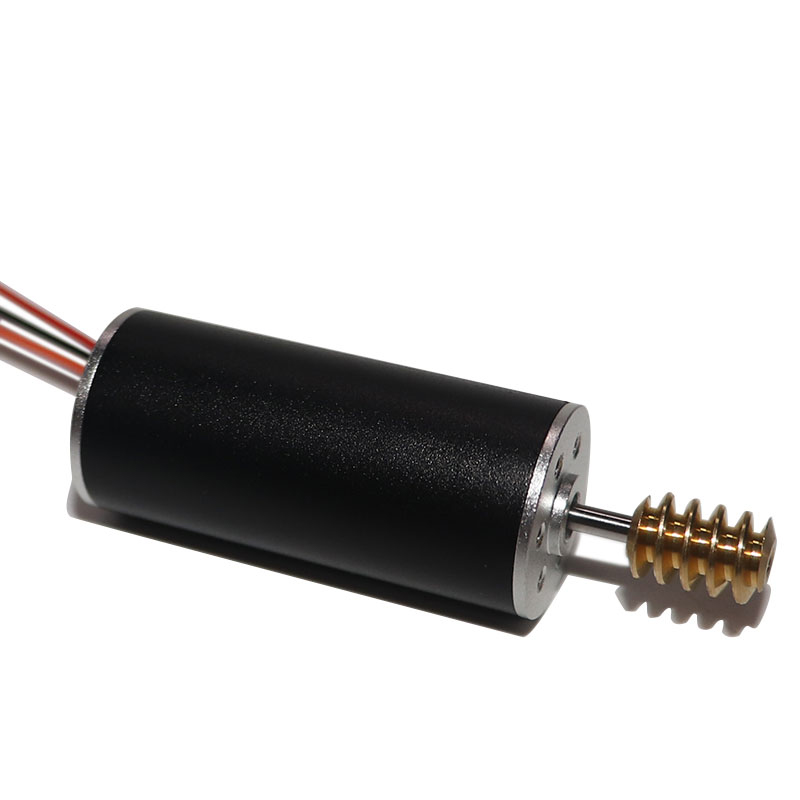
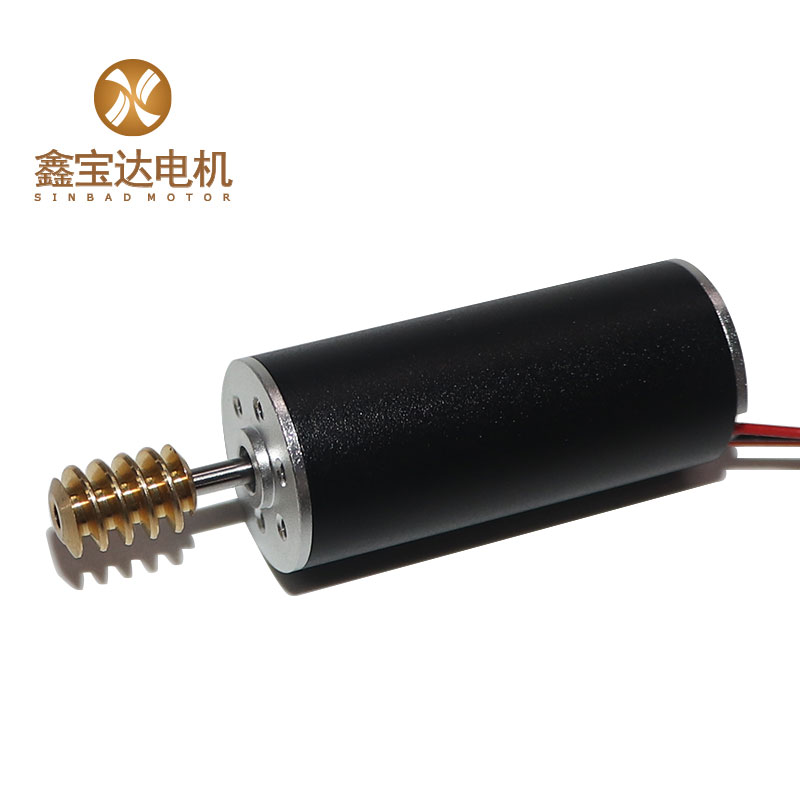
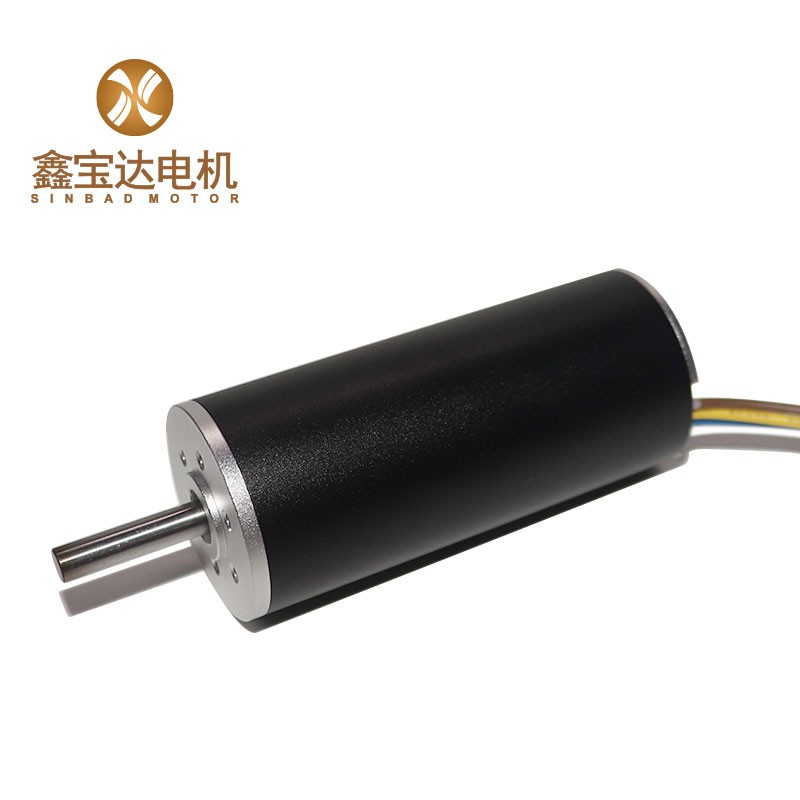
Motor DC sine nucleo et sine spazzolis XBD-1636 est motor summae efficaciae. Eius constructio sine nucleo et designatio sine spazzolis experientiam rotationis lenem praebent, periculum dentationis minuunt, et diuturnitatem motoris augent. Hic motor est electio optima pro ampla varietate applicationum, inter quas drones, vehicula electrica, et aliae applicationes quae magnam efficientiam energiae requirunt.
Summa summarum, motor DC sine nucleo et sine spazzolis XBD-1636 est motor fidus et efficax qui praestare potest efficaciam superiorem pro necessitatibus applicationis tuae.
Applicatio
Motores sine nucleo Sinbad latam applicationum varietatem habent, ut in robotis, dronis, apparatu medico, autocinetis, informationibus et communicationibus, instrumentis electricis, apparatu pulchritudinis, instrumentis praecisionis, et industria militari.










Commodum
Motor DC sine nucleo et sine spazzolis XBD-1636 pluribus commodis praecipuis gloriatur:
1. Designatio sine nucleo: Motor constructionem sine nucleo utitur, quae experientiam rotationis leniorem praebet et periculum dentationis minuit. Hoc efficientiam auget et sonitum imminuit.
2. Structura sine spazzolis: Motor designo sine spazzolis operatur, quo spazzolas et commutatores removentur. Hoc non solum efficientiam auget, sed etiam diuturnitatem motoris auget.
3. Levis et compactus: Designatio compacta motorem aptum reddit ad usum in robotica, industria aëronautica, et applicationibus autocineticis.
4. Adaptabilis: Motor aptari potest ad requisita specifica magnitudinis, potentiae, et functionis implenda, ut in quavis applicatione optima sit functio.
Summa summarum, hae commoditates motorem XBD-1636 sine nucleo et sine spazzolis DC optionem valde efficientem et fidam ad varia genera applicationum faciunt. Designatio eius sine nucleo et sine spazzolis et aestimatio altae efficientiae eum praecipue aptum reddunt ad usum in dronis, vehiculis electricis, et aliis applicationibus ubi longa vita pilae et alta efficientia factores clavis sunt.
Parametrum
| Modelus motoris 1636 | |||||
| Apud nominalem | |||||
| Tensio nominalis | V | 9 | 12 | 18 | 24 |
| Celeritas nominalis | rpm | 15355 | 14760 | 15285 | 14276 |
| Current nominalis | A | 1.51 | 1.19 | 0.71 | 0.56 |
| Momentum torquens nominale | mNm | 6.39 | 6.57 | 5.38 | 5.90 |
| Onus liberum | |||||
| Celeritas sine onere | rpm | 18500 | 18000 | 17950 | 17200 |
| Currens sine onere | mA | CLXXX | 135 | 130 | centum |
| Ad maximam efficaciam | |||||
| Efficacia maxima | % | 72.2 | 72.2 | 67.2 | 65.8 |
| Celeritas | rpm | 16095 | 15660 | 15168 | 14448 |
| Currens | A | 1.197 | 0.897 | 0.730 | 0.532 |
| Momentum torquens | mNm | 4.60 | 4.74 | 5.56 | 5.55 |
| Ad maximam potentiam output | |||||
| Maxima potentia producta | W | 17.2 | 17.2 | 16.8 | 15.6 |
| Celeritas | rpm | 9250 | 9000 | 8975 | 8600 |
| Currens | A | 4.1 | 3.1 | 2.1 | 1.5 |
| Momentum torquens | mNm | 17.80 | 18.25 | 17.93 | 17.35 |
| Ad stabulum | |||||
| Currens stagnans | A | VIII.00 | sex.00 | 4.00 | 2.80 |
| Momentum torquens stagnans | mNm | 35.50 | 36.50 | 35.85 | 34.69 |
| Constantes motoriae | |||||
| Resistentia terminalis | Ω | 1.13 | 2.00 | 4.50 | 8.57 |
| Inductantia terminalis | mH | 0.07 | 0.125 | 0.282 | 0.265 |
| Constans torsionis | mNm/A | 4.54 | 6.22 | 9.26 | 12.85 |
| Constans celeritatis | rpm/V | 2056 | 1500 | 997 | DCCXVII |
| Constans celeritas/momentum torquens | rpm/mNm | 521.0 | 493.2 | 500.6 | 495.8 |
| Constans temporis mechanica | ms | 2.73 | 2.58 | 2.62 | 2.60 |
| Inertia rotoris | g·cm² | 0.50 | 0.50 | 0.50 | 0.50 |
| Numerus parium polorum 1 | |||||
| Numerus phasis 3 | |||||
| Pondus motoris | g | 29 | |||
| Typica sonitus altitudine | dB | ≤50 | |||
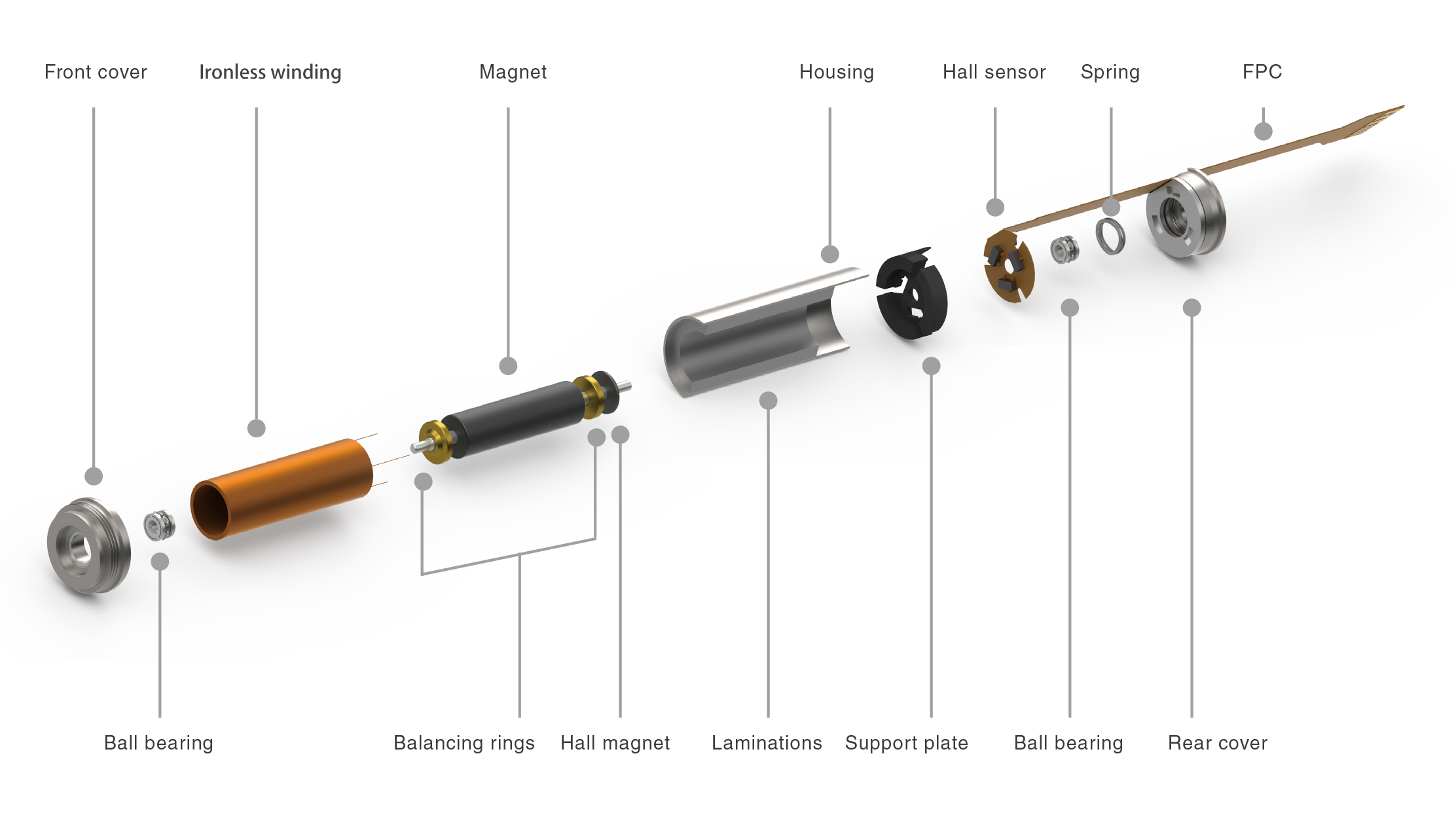
Exempla


Structurae
Quaestiones Frequentes
A: Ita. Fabricatores sumus qui in Motoribus DC Sine Nucleo ab anno 2011 specializantur.
A: Turmam QC habemus quae cum TQM obsequitur, quisque gradus secundum normas est.
A: Solite, MOQ = 100. Sed parvae copiae 3-5 accipiuntur.
A: Exemplar tibi praesto est. Quaeso, nobiscum de singulis contactum fac. Cum pretium exempli tibi posuerimus, libenter te habe; pecunia tibi reddetur cum magnam copiam rerum mandatam facies.
A: inquisitionem mitte → pretium accipe → singula pacisce → exemplum confirma → contractum/depositum signa → productio massalis → onus paratum → statera/traditio → ulteriorem cooperationem.
A: Tempus traditionis a quantitate quam iubes pendet. Solet inter triginta et quadraginta quinque dies calendarii sumere.
A: T/T antea accipimus. Praeterea, varias rationes argentarias habemus ad pecuniam accipiendam, ut dollariorum Americanorum vel RMB etc.
A: Solutiones per T/T, PayPal accipimus, aliae rationes solutionis etiam accipi possunt, quaeso nobiscum contactum facias antequam per alias rationes solutionis solvas. Etiam depositum 30-50% praesto est, reliqua pecunia ante missionem solvenda est.
-
Motor DC sine spazzolis XBD-3542 24V 6000rpm UAV
-
Nucleus motoris sine spazzolis BLDC-50100 altae efficientiae...
-
Motor DC sine spazzolis sine nucleo celerrimus pro Beau...
-
XBD-1636 torques magni celeritatis rpm bldc 12v 24v 625...
-
BLDC-1722 motor 12v sine spazzolis DC cum torque magno...
-
Motor sine spazzolis 12v 24v torques magni...