
2.1 Ferculum et eius munus in structura motoris
Structurae communes instrumentorum electricorum includunt rotorem motoris (axis, nucleus rotoris, convolutio), statorem (nucleus statoris, convolutio statoris, capsa iuncturae, operculum extremitatis, operculum ferculi, etc.) et partes connectentes (ferculum, sigillum, penicillum carbonis, etc.) et alia elementa maiora. In omnibus partibus structurae motoris, quaedam onus axis et radiale ferunt, sed non habent proprium motum relativum internum; quaedam habent proprium motum relativum internum post ferculum, sed non ferunt onus axis radiale. Soli ferculi et onus axis et radiale ferunt dum interius inter se moventur (relative ad anulum interiorem, anulum exteriorem et corpus volubile). Ergo, ipse ferculus pars sensibilis structurae motoris est. Hoc etiam determinat momentum dispositionis ferculi in motoribus industrialibus.
Diagramma analysis terebrae electricae
2.2 Gradus fundamentales dispositionis volubilis ferculi in motore
Dispositio fulcrorum volubilium in motoribus electricis instrumentorum ad processum collocandi varia genera fulcrorum in systema axe refertur cum ingeniarii structuram motorum electricorum instrumentorum designant. Ad rectam dispositionem fulcrorum motorum efficiendam, necesse est:
Primum gradum: intellegere condicionem operandi volventium ferculorum in instrumentis. Haec includunt:
- Motor horizontalis vel motor verticalis
Opera electrica cum terebra electrica, serra electrica, dolabra electrica, malleo electrico, aliisque generibus variis, confirmando motorem in forma institutionis fulcri verticalis et horizontalis, directione oneris eius diversa erit. Pro motoribus horizontalibus, gravitas erit onus radiale, pro motoribus verticalibus autem, gravitas erit onus axiale. Hoc magnopere afficiet electionem generis fulcri et dispositionem fulcri in motore.
- Celeritas motoris requisita
Celeritas motoris requisita magnitudinem fulcri et electionem generis fulcri, necnon configurationem fulcri in motore afficiet.
- Computatio oneris dynamici ferendi
Secundum celeritatem motoris, potentiam/momentum rotatorium nominalem, aliosque parametros, utitur norma (GB/T6391-2010/ISO 281 2007) ad onus dynamicum sphaericarum fulcrorum calculandum, magnitudinem sphaericarum fulcrorum idoneam, gradum praecisionis, et cetera eligenda.
- Alia requisita: ut requisita canalizationis axialis, vibratio, strepitus, prohibitio pulveris, differentia in materia structurae, inclinatio motoris, etc.
Breviter, antequam designatio et selectio fulcrorum motoris instrumentorum electricorum incipiatur, necesse est plene intellegere condicionem operis actualem motoris, ut selectio rationabilis et certa posterioris fiat.
Gradus 3: Genus ferendi determina.
Secundum duos primos gradus, onus ferculi et structura systematis axis extremitatis fixae et extremitatis fluitantis selectae considerantur, deinde genera ferculi idonea pro extremitate fixa et extremitate fluitantis secundum proprietates ferculi eliguntur.
3. Exempla dispositionis typicae ferculorum motoris
Multae sunt dispositiones ferculorum motorum. Structura ferculi motorum vulgo adhibita varietatem installationis et structurae habet. Sequentia exemplum structurae ferculi sphaerici duplicis sulci profundi maxime manifestae adhibent:
3.1 Structura sphaerica duplici sulco profundo
Structura sphaerica duplicis sulci profundi est structura axis in motoribus industrialibus frequentissima, et structura principalis sustentans axis ex duobus sphaericis sulci profundi constat. Duo sphaerica fercula sulci profundi inter se laxantur.
Ut in imagine infra demonstratur:
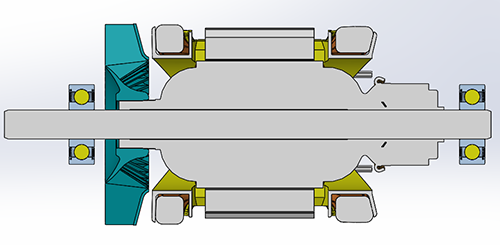
Profilum ferendi
In figura, fulcrum extremitatis extensionis axis est fulcrum extremitatis positionis, et fulcrum extremitatis non extensionis axis est fulcrum extremitatis fluitans. Duo extremitates fulcri onus radiale in axe sustinent, dum fulcrum extremitatis positionis (ad finem extensionis axis in hac structura situm) onus axiale axis sustinet.
Solet dispositio fulcrorum motoris huius structurae apta esse oneris axialis radialis motoris non magni. Commune est copulatio oneris structurae micromotoris.
Tempus publicationis: Iun.-01-2023