




Motor BLDC sine nucleo, servo dentato vermiculato XBD-2245
Introductio Producti
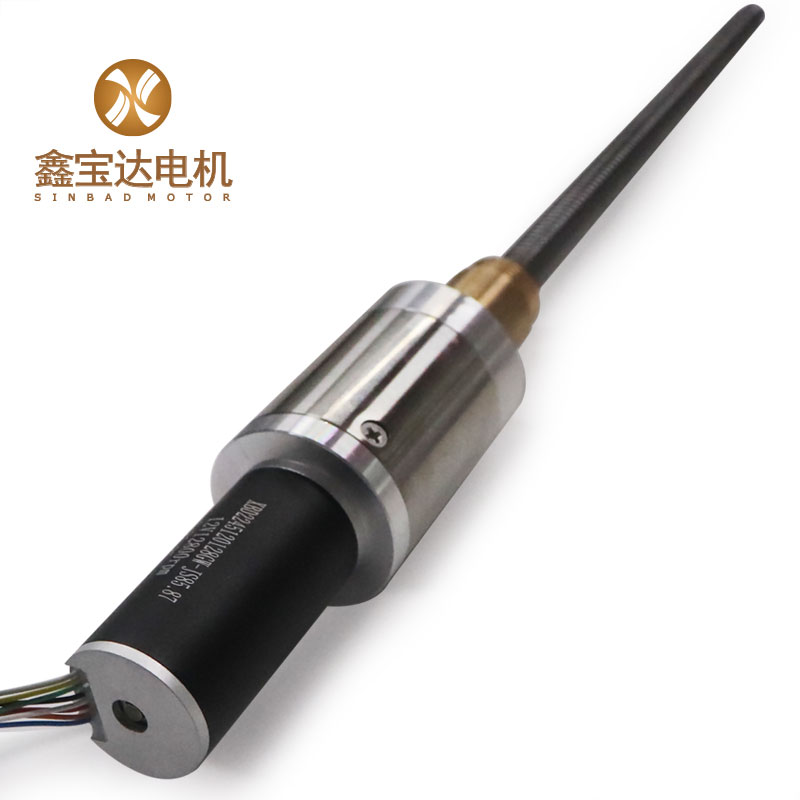
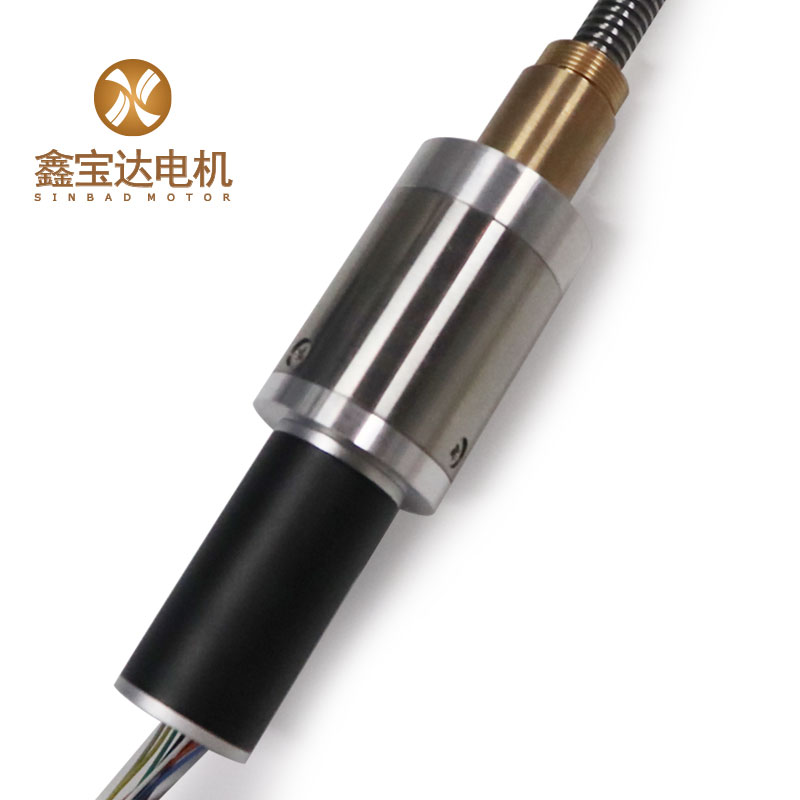
Motor reductionis cum dentibus vermis sine spazzolis XBD-2245 est systema transmissionis summae efficacitatis quod longam vitam motoris sine spazzolis cum magnis torquentibus proprietatibus reductionis cum dentibus vermis coniungit. Hic motor designatus est cum attentione ad firmitatem et fidem, operationem stabilem sub variis condicionibus laboris arduis praestans. Sive in linea productionis automataria complexa sive in operatione instrumentorum praecisionis, potentiam necessariam et praecisionem moderationis praebere potest. Hic motor praecipue aptus est ad usus qui accuratam et celeritatis moderationem exigent, ut robotica, systemata positionis praecisionis, et apparatum medicum summae qualitatis.
Commodum
Commoda Motoris DC Sine Nucleo et Sine Spazzolis XBD-2245 includunt:
1. Magnitudo ultracompacta ad usus ubi spatium angustum est.
2. Designatio sine nucleo ad operationem lenem et quietam
3. Designatio sine spazzolis ad maiorem efficientiam et diuturniorem vitam.
4. Alta emissio torques ad accuratam gubernationem et efficaciam
5. Vibratio humilis ad maiorem stabilitatem et accuratiam
- Variis optionibus convolutionis, capsae rotarum, et encoderis adaptabilis ad requisita specifica variarum applicationum implenda.
Applicatio
Motores sine nucleo Sinbad latam applicationum varietatem habent, ut in robotis, dronis, apparatu medico, autocinetis, informationibus et communicationibus, instrumentis electricis, apparatu pulchritudinis, instrumentis praecisionis, et industria militari.











Parametrum
| Modelus motoris 2245 | |||||
| Apud nominalem | |||||
| Tensio nominalis | V | 12 | 15 | 18 | 24 |
| Celeritas nominalis | rpm | 11050 | 10625 | 8925 | 10370 |
| Current nominalis | A | 1.82 | 1.36 | 0.87 | 0.81 |
| Momentum torquens nominale | mNm | 13.84 | 13.58 | 12.23 | 12.97 |
| Onus liberum | |||||
| Celeritas sine onere | rpm | Tredecim milia | 12500 | 10500 | 12200 |
| Currens sine onere | mA | 220 | CL | 110 | 110 |
| Ad maximam efficaciam | |||||
| Efficacia maxima | % | 73.6 | 74.8 | 73.0 | 73.2 |
| Celeritas | rpm | 11375 | Undecim milia | 9188 | 10675 |
| Currens | A | 1.555 | 1.116 | 0.746 | 0.688 |
| Momentum torquens | mNm | 11.5 | 10.87 | 10.20 | 10.81 |
| Ad maximam potentiam output | |||||
| Maxima potentia producta | W | 31.4 | 29.6 | 22.4 | 27.6 |
| Celeritas | rpm | 6500 | 6250 | 5250 | 6100 |
| Currens | A | 5.6 | 4.2 | 2.7 | 2.5 |
| Momentum torquens | mNm | 46.1 | 45.28 | 40.78 | 43.23 |
| Ad stabulum | |||||
| Currens stagnans | A | 10.90 | 8.20 | 5.20 | 4.80 |
| Momentum torquens stagnans | mNm | 92.2 | 90.56 | 81.56 | 86.45 |
| Constantes motoriae | |||||
| Resistentia terminalis | Ω | 1.10 | 1.83 | 3.46 | 5.00 |
| Inductantia terminalis | mH | 0.180 | 0.293 | 0.504 | 0.760 |
| Constans torsionis | mNm/A | 8.64 | 11.25 | 16.02 | 18.39 |
| Constans celeritatis | rpm/V | 1083 | DCCCXXXIII | 583 | 508 |
| Constans celeritas/momentum torquens | rpm/mNm | 140.9 | 138.0 | 128.7 | 141.1 |
| Constans temporis mechanica | ms | 3.22 | 3.15 | 2.94 | 3.22 |
| Inertia rotoris | g·cm² | 2.18 | 2.18 | 2.18 | 2.18 |
| Numerus parium polorum 1 | |||||
| Numerus phasis 3 | |||||
| Pondus motoris | g | 84.8 | |||
| Typica sonitus altitudine | dB | ≤45 | |||
Exempla
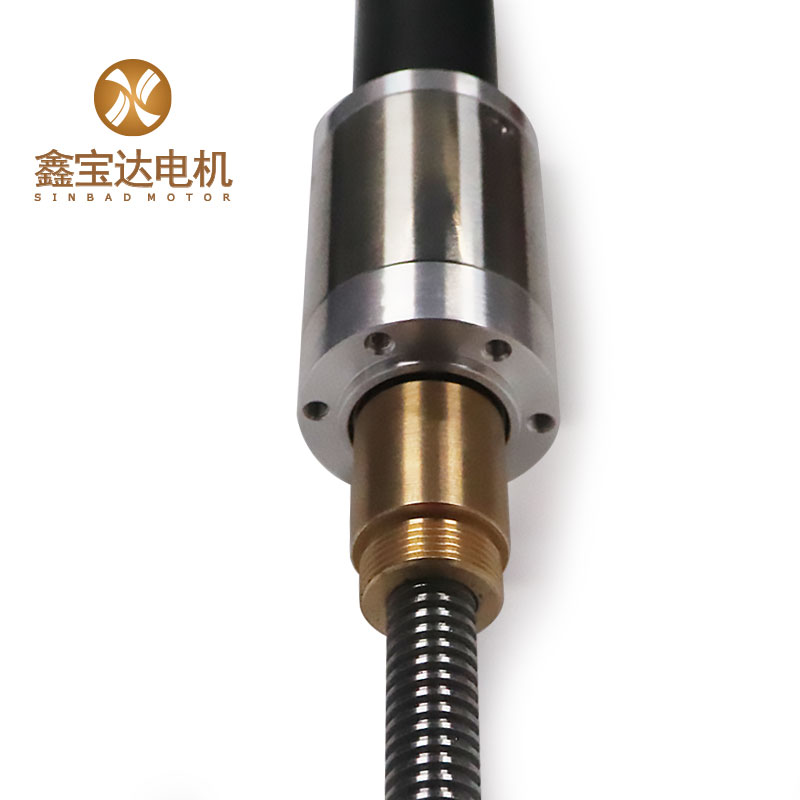
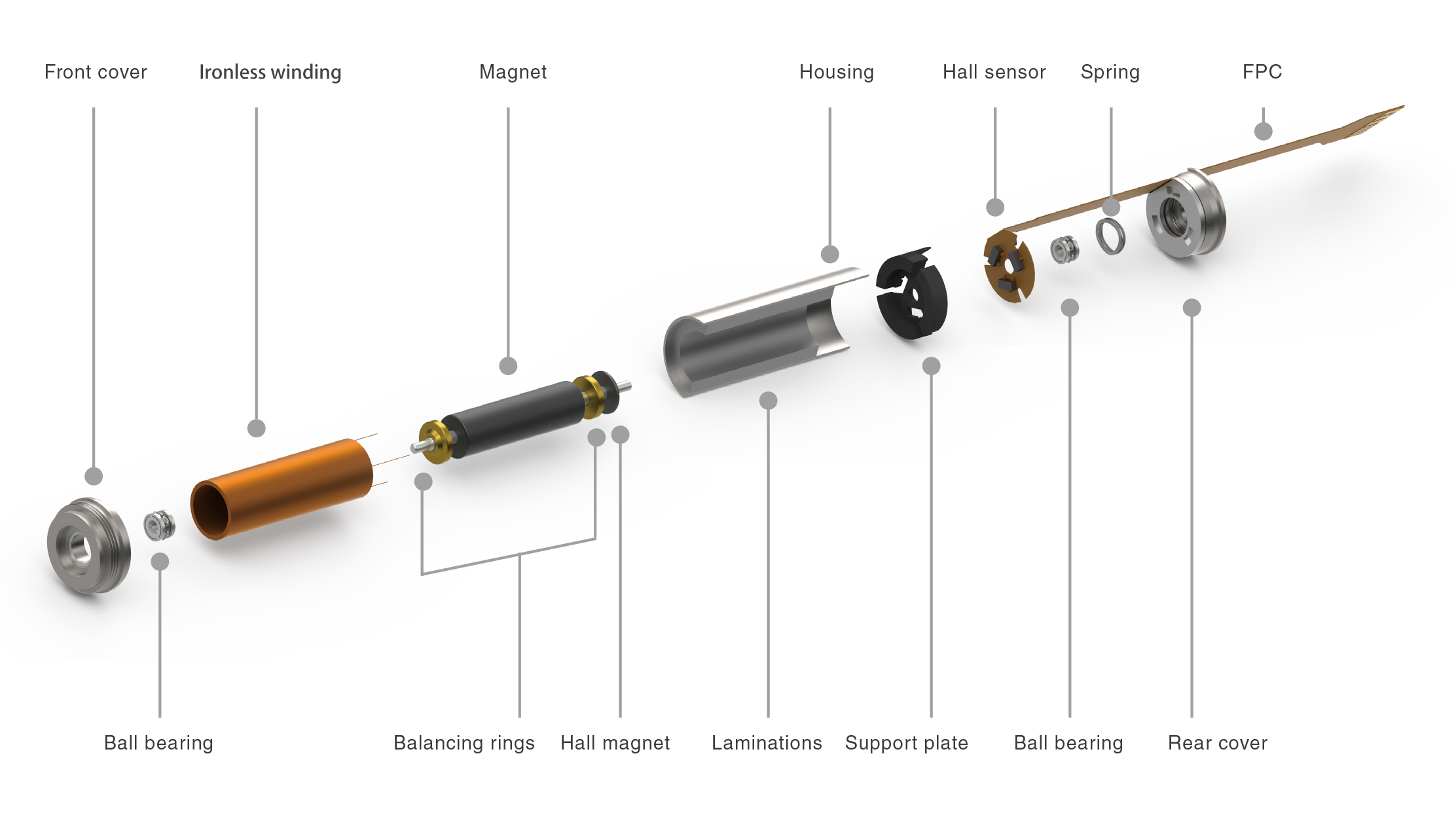
Structurae
Quaestiones Frequentes
A: Ita. Fabricatores sumus qui in Motoribus DC Sine Nucleo ab anno 2011 specializantur.
A: Turmam QC habemus quae cum TQM obsequitur, quisque gradus secundum normas est.
A: Solite, MOQ = 100. Sed parvae copiae 3-5 accipiuntur.
A: Exemplar tibi praesto est. Quaeso, nobiscum contactum fac de singulis. Cum pretium exempli tibi posuerimus, libenter te habe; pecunia tibi reddetur cum magnam copiam mandati tui dabis.
A: inquisitionem mitte → pretium accipe → singula pacisce → exemplum confirma → contractum/depositum signa → productio massalis → onus paratum → statera/traditio → ulteriorem cooperationem.
A: Tempus traditionis a quantitate quam iubes pendet. Solet XV-XXV dies laboris capere.
A: T/T antea accipimus. Praeterea, varias rationes argentarias habemus ad pecuniam accipiendam, ut dollariorum Americanorum vel RMB etc.
A: Solutiones per T/T, PayPal accipimus, aliae rationes solutionis etiam accipi possunt, quaeso nobiscum contactum facias antequam per alias rationes solutionis solvas. Etiam depositum 30-50% praesto est, reliqua pecunia ante missionem solvenda est.
Motores DC sine nucleo et sine spazzolis plura commoda prae motoribus DC traditis offerunt. Quaedam ex his commodis sunt:
1. Efficax
Motores DC sine nucleo et sine spazzolis machinae efficaces sunt quia sine spazzolis sunt. Hoc significat eos non peniculos ad commutationem mechanicam pendere, frictionem minuendo et necessitatem frequentis sustentationis eliminando. Haec efficacia motores DC sine nucleo et sine spazzolis aptos reddit ad varia applicationes quae magnam efficaciam et parvam energiae consumptionem requirunt.
2. Designatio compacta
Motores BLDC sine nucleo compacti sunt et apti ad varia genera applicationum, inter quas eas quae motores parvos levesque requirunt. Levitas motorum eos aptos reddit ad applicationes quae apparatum ponderi sensibilem requirunt. Haec forma compacta proprietas clavis est, quae eos aptos reddit industriis ut aerospatiali, medica et robotica.
3. Operatio sonitus parvi
Motores DC sine nucleo et sine spazzolis designantur ut cum minimo strepitu currant. Quia motor spazzolas ad commutationem non utitur, minorem strepitum mechanicum quam motores conventionales producit. Silens operatio motoris eum optimam electionem ad varietatem applicationum facit. Praeterea, motores BLDC sine nucleo celeritate altissima currere possunt sine strepitu nimio producendo, eos ideales reddens ad applicationes altae celeritatis.
4. Imperium altae praecisionis
Motores BLDC sine nucleo praeclaram celeritatis et momenti moderationem praebent, eos optimam electionem faciunt ad applicationes quae magnam praecisionem requirunt. Haec accurata moderatio per usum systematis moderationis circuli clausi efficitur, quod responsum moderatori motoris praebet, ei permittens celeritatem et momentum secundum necessitates applicationis accommodare.
5. Longa vita
Comparati cum motoribus DC traditis, motores DC sine nucleo et sine peniculis longiorem vitam utilem habent. Absentia peniculorum in motore DC sine nucleo et sine peniculis detrimentum cum commutatione peniculorum coniunctum minuit. Praeterea, motores DC sine nucleo et sine peniculis systemate moderationis circuli clausi nituntur et minus obnoxii sunt ad defectum quam motores DC traditi. Haec vita utilis extensa motores DC sine nucleo et sine peniculis optimam electionem ad applicationes altae firmitatis facit.
In conclusione
Motores BLDC sine nucleo praeclara commoda et utilitates prae motoribus DC traditis offerunt. Hae utilitates includunt altam efficientiam, designum compactum, operationem quietam, moderationem altae praecisionis et longam vitam utilem. Cum commodis motorum DC sine nucleo et sine spazzolis, apti sunt ad varia applicationes in variis industriis, inter quas robotica, aerospatium, instrumenta medica, et automatio, inter alia.
-
Motor micro-DC sine nucleo 12V 10000rpm XBD-1722 h...
-
Motor cochlearis BLDC XBD-1656 sine nucleo 10000 rpm...
-
Motor celerrimus 36V sine spazzolis XBD-3660 ad electricitatem...
-
Motor sine spazzolis XBD-3090 sine nucleo 12 V DC...
-
Motor sine spazzolis BLDC-1636 pretio vili sine nucleo...
-

XBD-2867 28mm 12V 9500rpm bldc sine spazzolis dc cor...