


XBD-50100 Motor sine spazzolis celeris, motor sine nucleo, impedantia motoris DC vilis pretii.
Introductio Producti
XBD-50100 est motor DC sine nucleo et sine spazzolis, propter magnum momentum rotatorium magnum laudatus. Designatio et constructio eius ad usum aptata eum liberant a dentibus et restrictionibus quae cum motoribus ferreis traditis coniunguntur, experientiam rotationis refinatam et fluidam offerentes. Designatio compacta huius motoris facultatem eius momentum rotatorium magnum praebendi celat, eumque optimam electionem facit pro apparatu altae praecisionis qui fontem potentiae fidum requirunt. Eius praestantia, efficacia, et diuturnitas eum optimam electionem reddunt pro campis sicut robotica et instrumenta medica, ubi praecisio et accuratio maximi momenti sunt. Architectura motoris sine spazzolis, statorem et rotorem comprehendens, systema electronicum moderandi utitur ad spiras statoris in sequentia excitandas quae campum magneticum rotantem creat, rotationem rotoris propellens. Systemata electronica moderandi sophistica XBD-50100 nostri moderationem accuratam celeritatis et momenti rotatorii faciliorem reddunt, eum ut alternativam superiorem motoribus DC cum spazzolis traditis per multas applicationes collocantes.
Applicatio
Motores sine nucleo Sinbad latam applicationum varietatem habent, ut in robotis, dronis, apparatu medico, autocinetis, informationibus et communicationibus, instrumentis electricis, apparatu pulchritudinis, instrumentis praecisionis, et industria militari.










Commodum
Commoda Motoris DC Sine Nucleo et Sine Spazzolis XBD-50100 in plura puncta principalia dividi possunt:
1. Designatio sine nucleo: Structura motoris sine nucleo experientiam rotationis leniorem praebet et periculum dentationis minuit, quod ad efficientiam auctam et sonitus imminutos ducere potest.
2. Structura sine spazzolis: Motor designo sine spazzolis operatur, quo spazzolas et commutatores removentur. Hoc non solum efficientiam auget, sed etiam diuturnitatem motoris auget.
3. Magnum momentum rotatorium emissus: Quamvis magnitudine compacta sit, XBD-50100 magnum momentum rotatorium praebet, quo fit ut aptus sit apparatibus altae praecisionis quae vim certam requirunt. Magnum momentum rotatorium emissus motoris etiam eum idealem reddit applicationibus gravibus ubi motor potens necessarius est.
Summa summarum, hae commoditates motorem XBD-50100 sine nucleo et sine spazzolis DC electionem fidam et efficientem ad amplam applicationum varietatem faciunt. Designatio eius sine nucleo et sine spazzolis et magnum momentum emissus eum praecipue aptum reddunt ad usum in robotica, instrumentis medicis, et aliis applicationibus ubi praecisio et potentia considerationes maximi momenti sunt.
Parametrum
| Modelus motoris 50100 | ||||
| Apud nominalem | ||||
| Tensio nominalis | V | 24 | 36 | 48 |
| Celeritas nominalis | rpm | 5984 | 5525 | 5355 |
| Current nominalis | A | 15.44 | 13.05 | 9.40 |
| Momentum torquens nominale | mNm | 501.51 | 668.79 | 659.41 |
| Onus liberum | ||||
| Celeritas sine onere | rpm | 6800 | 6500 | 6300 |
| Currens sine onere | mA | quingenti | 350 | 290 |
| Ad maximam efficaciam | ||||
| Efficacia maxima | % | 87.8 | 87.6 | 86.7 |
| Celeritas | rpm | 6392 | 6078 | 5891 |
| Currens | A | 7.970 | 5.852 | 4.236 |
| Momentum torquens | mNm | 250.80 | 289.81 | 285.74 |
| Ad maximam potentiam output | ||||
| Maxima potentia producta | W | 744.0 | 758.7 | 725.1 |
| Celeritas | rpm | 3400 | 3250 | 3150 |
| Currens | A | 62.8 | 42.7 | 30.6 |
| Momentum torquens | mNm | 2089.60 | 2229.29 | 2198.03 |
| Ad stabulum | ||||
| Currens stagnans | A | 125.0 | 85.0 | 61.0 |
| Momentum torquens stagnans | mNm | 4179.30 | 4458.57 | 4396.05 |
| Constantes motoriae | ||||
| Resistentia terminalis | Ω | 0.19 | 0.42 | 0.79 |
| Inductantia terminalis | mH | 0.155 | 0.348 | 0.638 |
| Constans torsionis | mNm/A | 33.57 | 52.67 | 72.41 |
| Constans celeritatis | rpm/V | 283.3 | 180.6 | 131.3 |
| Constans celeritas/momentum torquens | rpm/mNm | 1.6 | 1.5 | 1.4 |
| Constans temporis mechanica | ms | 4.10 | 3.67 | 3.61 |
| Inertia rotoris | g·cm² | 240.5 | 240.5 | 240.5 |
| Numerus parium polorum 1 | ||||
| Numerus phasis 3 | ||||
| Pondus motoris | g | DCCCXXXVII | ||
| Typica sonitus altitudine | dB | ≤50 | ||
Exempla
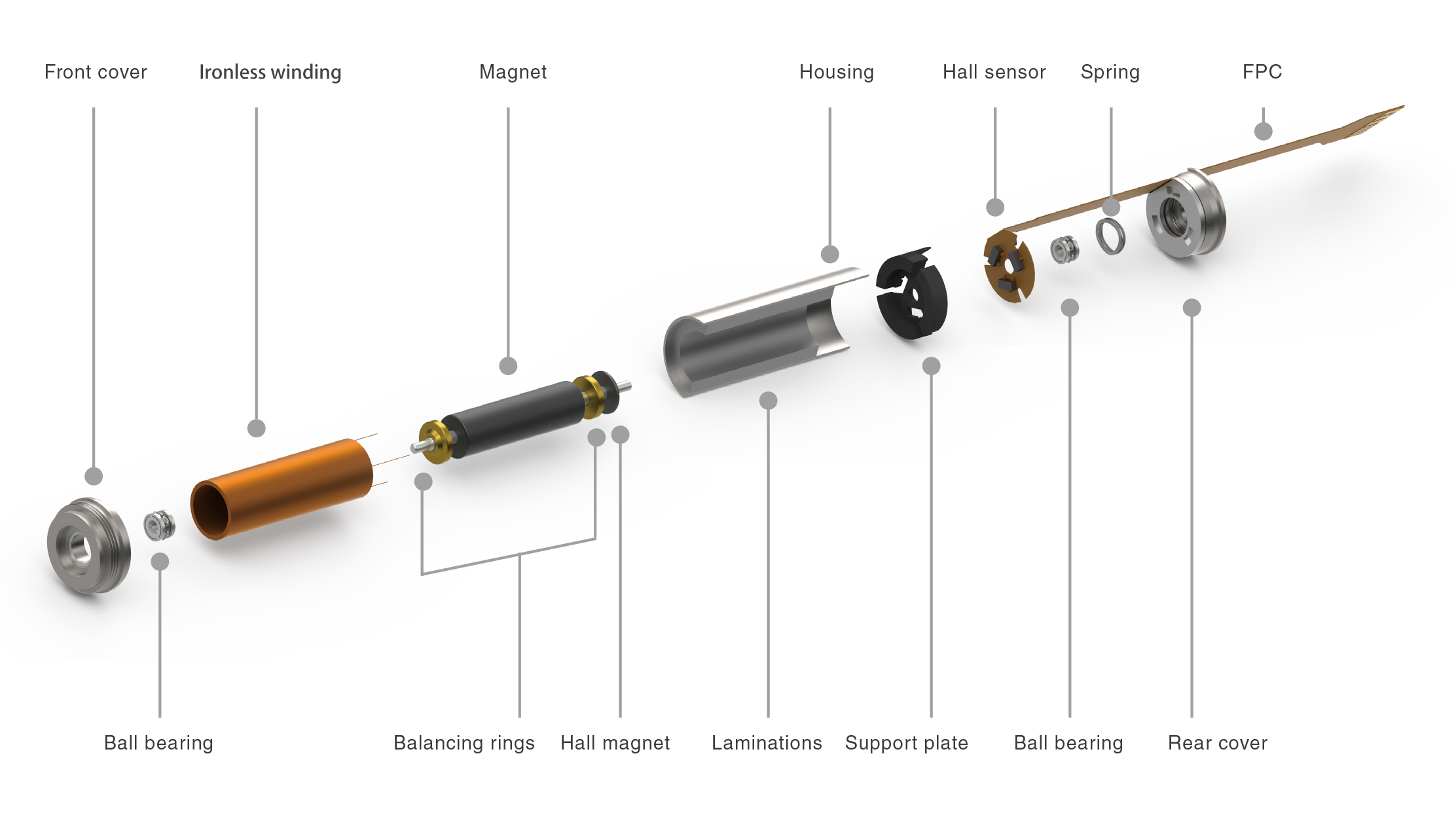
Structurae
Quaestiones Frequentes
A: Ita. Fabricatores sumus qui in Motoribus DC Sine Nucleo ab anno 2011 specializantur.
A: Turmam QC habemus quae cum TQM obsequitur, quisque gradus secundum normas est.
A: Solite, MOQ = 100. Sed parvae copiae 3-5 accipiuntur.
A: Exemplar tibi praesto est. Quaeso, nobiscum contactum fac de singulis. Cum pretium exempli tibi posuerimus, libenter te habe; pecunia tibi reddetur cum magnam copiam mandati tui dabis.
A: inquisitionem mitte → pretium accipe → singula pacisce → exemplum confirma → contractum/depositum signa → productio massalis → onus paratum → statera/traditio → ulteriorem cooperationem.
A: Tempus traditionis a quantitate quam iubes pendet. Solet inter triginta et quadraginta quinque dies calendarii sumere.
A: T/T antea accipimus. Praeterea, varias rationes argentarias habemus ad pecuniam accipiendam, ut dollariorum Americanorum vel RMB etc.
A: Solutiones per T/T, PayPal accipimus, aliae rationes solutionis etiam accipi possunt, quaeso nobiscum contactum facias antequam per alias rationes solutionis solvas. Etiam depositum 30-50% praesto est, reliqua pecunia ante missionem solvenda est.
Motor DC sine nucleo et sine spazzolis est motor adhibitus in ampla varietate applicationum, ab electronicis ad machinas industriales. Hic motor propter efficientiam magnam, firmitatem et durabilitatem popularis est.
Una ex praecipuis proprietatibus motoris BLDC sine ferro est quod nucleum ferreum non habet. Hoc significat motorem non habere nucleum ferreum traditionalem qui in aliis generibus motorum invenitur. Loco eius, motor utitur filo cupreo vel aluminii circa basin cylindricam involuto. Hoc filum convolutum fungitur quasi armatura motoris.
Alia proprietas motoris BLDC sine nucleo est quod sine spazzolis est. Hoc significat motorem non penicillis pendere ad transferendum currentem ad rotorem motoris. Potius, rotor motoris constat ex magnetibus qui cum campo magnetico armaturae interagunt ad momentum generandum.
Motores BLDC sine nucleo efficaciores sunt quam alii motorum genera propter absentiam peniculorum et nuclei ferrei. Hoc fit quia armatura motoris levior est et motor minus caloris generat propter resistentiam inferiorem. Ergo, motor magna celeritate cum minima energiae iactura currere potest.
Praeterea, motores BLDC sine nucleo multo silentiores sunt quam alii motorum genera. Hoc fit quia designatio motoris sonitum a peniculis et nucleo ferreo generatum eliminat. Hoc motorem idealem reddit ad applicationes quae operationem silentem requirunt.
Propter consilium suum, motores BLDC sine nucleo etiam diutius durant. Cum motor peniculos non habeat, nulla detritio in armatura motoris est. Praeterea, nullus nucleus ferreus significat nulla campi magnetici qui motorem deteri possent tempore procedente. Ergo, motor diutius quam alii generis motores durat.
Denique, motores DC sine nucleo et sine spazzolis versatiles sunt. In ampla applicationum varietate adhiberi possunt, inter quas robotica, instrumenta medica, apparatus aerospatialis et machinae industriales. Efficientia, fides et durabilitas huius motoris eum optimam electionem his applicationibus faciunt.
Summa summarum, motor DC sine nucleo et sine spazzolis est motor qui plura commoda prae aliis generibus motorum habet. Absentia nucleorum ferreorum et spazzolarum, alta efficientia, silentium operationis, longa vita et versatilitas eum electionem attractivam ad latam applicationum varietatem faciunt. Cum technologia pergit emendari, probabile est motores DC sine ferro et sine spazzolis magis populares et latius in usu futuros esse.
-

Motor XBD-3270 BLDC cum Capsa Reducta Altae Qualitatis H...
-

BLDC-4560 impulsor motoris sine spazzolis sine nucleo DC mo...
-
Motor sine spazzolis 12v 24v torques magni...
-
Motor DC sine nucleo sine spazzolis XBD-3670
-
Motor impulsor sine spazzolis XBD-50100 celeris celeritatis...
-
Motor sine spazzolis XBD-4550 irobot, motor sine nucleo...